
ИСТОРИЯ ЭЛЕКТРОНИКИ |
Юрий Петропавловский
Работы по созданию навигационных спутниковых систем (НСС) в СССР начались в середине 1960-годов, однако идея создания таких систем зародилась значительно раньше (в 1956 году) в стенах Научно-исследовательского гидрографического штурманского института – НИИ-9 ВМФ (НИГШИ ВМФ, г. Ленинград). Идею высказал старший научный сотрудник этого института Вадим Алексеевич Фуфаев (есть и другие претенденты на первенство этой идеи). В институте была создана инициативная группа по исследованиям возможностей создания спутниковой навигационной системы различными методами (доплеровским, дальномерным и угловым) под руководством В. А. Фуфаева и Е. Ф. Суворова). Дальнейшие разработки проводились в 1958-1959 годах совместно с подмосковным НИИ-4 МО. В 1960 году был разработан эскизный проект (аванпроект) первой советской низкоорбитальной спутниковой навигационной системы (СРНС), однако дальнейшего продолжения проекта по различным причинам не последовало.


Необходимость создания собственной НСС, в первую очередь, была вызвана требованием достижения паритета в морской составляющей ядерных вооружений между СССР и США, поскольку уже в 1964 году на вооружение ВМС США была сдана НСС под названием NAVSAT или NNSS (Navy Navigational Satellite System) в составе орбитальной группировки из четырех спутников Transit на низких полярных орбитах.
 |
||
| Рисунок 1. | Ричард Кершнер. | |
NNSS или Transit была разработана совместно Управлением перспективных исследовательских проектов Министерства обороны США (DARPA) и Лабораторией прикладной физики (APL) университета Дж. Гопкинса под руководством доктора Ричарда Кершнера (Richard Kerschner, 1913-1982 гг. (Рисунок 1) по заказу ВМФ США и являлась первой в мире действующей НСС. Идея о возможности создания спутниковой системы навигации обрела очертания сразу после запуска первого советского искусственного спутника земли 4 октября 1957 года. Наблюдая за его сигналами, сотрудники APL Уильям Гиер (William Guier) и Джордж Вейффенбах (George Weiffenbach) смогли определить его орбиту методом измерения допплерского сдвига частоты сигнала, передаваемого спутником. Стоит заметить, что за сигналами первого спутника наблюдали радиолюбители всего мира; частоты сигналов 20.005 МГц и 40.002 МГц лежали вблизи любительских диапазонов 15 метров и 38-40 МГц. (В СССР этот диапазон был выделен для радиолюбителей в 1955 году).
 |
||
| Рисунок 2. | Подготовка к запуску космического аппарата Transit-2F. | |
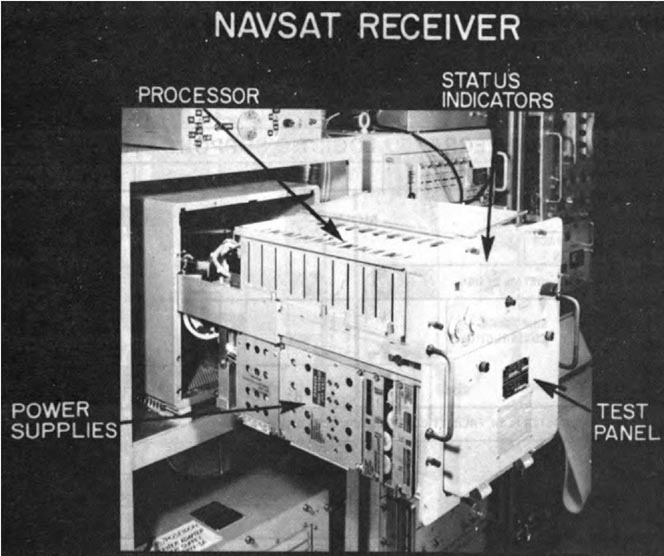
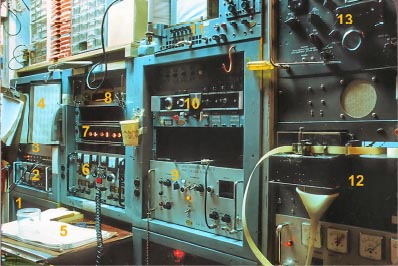
Разработка Transit началась в 1958 году, в 1959 году был неудачно запущен прототип спутника Transit 1A, второй спутник Transit 1B был успешно выведен на орбиту в апреле 1960 года. Навигационная система NNSS была полностью введена в эксплуатацию в 1964 году. На Рисунке 2 показана подготовка к запуску спутника Transit 2F. В 1967 году NNSS стала доступной для гражданских судов не только США, но и других стран (кроме социалистических). На Рисунке 3 показаны судовой навигационный приемник сигналов НСС Transit и оборудование наземной станции слежения того времени.
 |
||
 |
||
| Рисунок 3. | Навигационный приемник сигналов НСС Transit и оборудование наземной станции слежения. 2 – таймер-счетчик, 6 – приемник слежения за сигналами спутников, 9 – блок оцифровки и тактовых сигналов, 10 – мастер-генератор тактовых сигналов, 12 – перфоратор бумажной ленты регистратора сигналов, 13 – коротковолновый приемник. |
|
По различным причинам в военной космической программе СССР раннего периода создание НСС не было предусмотрено, и только в 1964 году вышло постановление ЦК КПСС и СМ СССР о создании навигационно-связной спутниковой системы в интересах ВМФ. К разработке НСС первого поколения, получившей название «Циклон», были привлечены различные организации. Практическую разработку системы в роли головной организации обеспечивало КБ прикладной механики МОМ (г. Красноярск-26) под руководством главного конструктора Михаила Федоровича Решетнева (Рисунок 4). За свою историю это КБ не раз меняло название (ОКБ-10, КБ ПМ, НПО ПМ); в настоящее время это ОАО «Информационные спутниковые системы» имени академика М. Ф. Решетнева» (ОАО ИСС, г. Железногорск).
|
|||||
| Рисунок 4. | М. Ф. Решетнев (а); памятник М. Ф. Решетневу в г. Железногорске (б); здания Сибирского государственного аэрокосмический университета имени академика М. Ф. Решетнева (СибГАУ) в г. Красноярске (в). |
||||


Запуск первого экспериментального навигационно-связного КА «Циклон» (спутник 11Ф617/Космос-192) был осуществлен в ноябре 1967 года с космодрома «Плесецк» ракетой-носителем «Космос-3М». Спутник вращался по круговой орбите высотой 740 км с периодом 100 минут и наклоном 74 градуса. Всего было запущено 11 КА этого типа (последний – в 1972 году) с высотой орбиты 750-1000 км. В 1971 году экспериментальная система из четырех «Циклонов» под названием «Залив» была принята в опытную эксплуатацию ВМФ. Начиная с 1973 года спутники для системы «Залив» получали такие же названия, первый КА «Залив-1» (Космос-574) был запущен в мае 1973 года, последний «Залив-15» – в июле 1978 года. Для измерения горизонтальных координат судов в системе «Циклон» использовался доплеровский метод измерений. В отличие от американских «Транзитов», КА «Циклон» были оснащены ретрансляторами, обеспечивающими радиотелеграфную связь подводных лодок и кораблей ВМФ с командными пунктами и между собой.
На основе полученных результатов летных испытаний спутники «Циклон» и сама система были модернизированы, и в 1976 году в эксплуатацию была введена навигационно-связная спутниковая система под названием «Парус» в составе шести космических аппаратов (КА) «Циклон-Б». С помощью системы можно было определить горизонтальные координаты судна с точностью 250-300 метров.
Следует отметить, что в СССР была реализована НСС и для гражданских министерств и ведомств. В 1974 году была начата разработка НСС под названием «Цикада», предназначенная как для ВМФ, так и для гражданских потребителей. Спутники системы имели такое же название; первый КА «Цикада» (Космос-883) был запущен в декабре 1976 года, девятнадцатый (Космос-2230) – в январе 1993 года. По внешнему виду все типы советских навигационных КА первого поколения весьма похожи (Рисунок 5).
|
||||
| Рисунок 5. | КА «Циклон» (а), «Надежда» (б). | |||


В США идея создания высокоточной системы спутниковой навигации «материализовалась» во время уик-энда в день труда в 1973 году на встрече заинтересованных офицеров Пентагона. На встрече было обсуждено создание навигационной спутниковой системы обороны (DNSS). Идея состояли в объединении технических решений всех существующих на то время навигационных систем (кроме NNSS были и другие). Реализация проекта глобальной системы позиционирования GPS потребовала значительных усилий различных ведомств и организаций. На первом этапе предполагалось вывести на орбиту 10 космических аппаратов Block-I, запуски которых состоялись в период 1978-1985 годов, в 1989-1990 годах было запущено 9 КА Block-II (Рисунок 6), а в 1990 году система GPS начала функционировать.
 |
||
| Рисунок 6. | Макет КА Block-II. | |
Международное сотрудничество в области спутниковой навигации началось после подписания в 1979 году в Ленинграде представителями СССР, США, Франции и Канады меморандума о сотрудничестве сторон в проекте совместной спутниковой системы поиска и спасения «КОСПАС-SARSAT». Первый КА для советского сегмента «КОСПАС-SARSAT» под названием «Циклон-Н» или «Надежда», изготовленный в ПО «Полет», был выведен на навигационную орбиту в июне 1982 года. 10 сентября с этого (в то время единственного) спутника был получен сигнал аварийного радиомаяка канадского самолета, потерпевшего крушение в горах Британской Колумбии (провинция Канады); в результате удалось спасти трех человек. Полномасштабное использование системы «КОСПАС-SARSAT» началось в 1985 году. Международные организации IMO и ICAO приняли решение об обязательном оснащении судов и самолетов радиомаяками системы с 1995 и 2005 года, соответственно.
В СССР НСС для гражданских потребителей, обеспечивающую высокоточное определение положения объектов в трех координатах, начали разрабатывать в середине 1970-х годов. Эскизный проект навигационной спутниковой системы ГЛОНАСС был разработан в 1978 году, а работы по ее реализации начались в 1979 году в соответствии с постановлением ЦК КПСС и СМ СССР и решениями военно-промышленной комиссии (ВПК) СМ СССР.
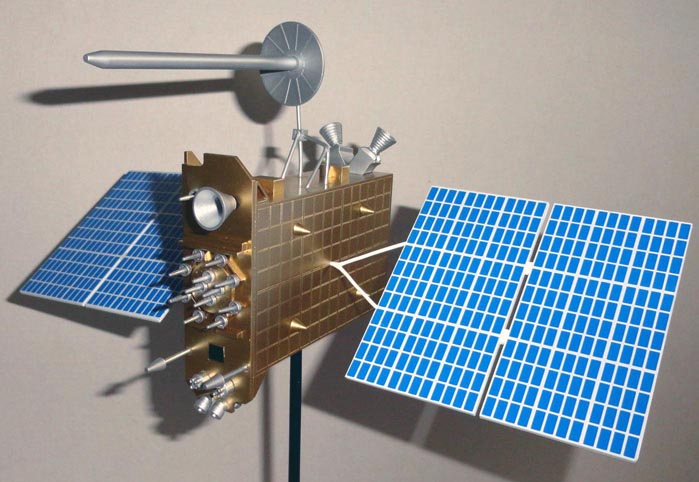
Строящаяся глобальная НСС (ГНСС) должна была состоять из 24 КА на круговых орбитах высотой 19140 км. Вывод КА предполагалось осуществлять группами по 3 КА ракетой-носителем «Протон-К» тяжелого класса с разгонным блоком ДМ. Однако по разным причинам такой порядок реализовать не удалось, и первый спутник «Глонасс» был запущен в октябре 1982 года с космодрома Байконур в блоке с двумя макетами. Последующие шесть запусков выводили по два КА и одному макету (Рисунок 7).
 |
||
| Рисунок 7. | Макет КА «Глонасс». | |
В ходе летных испытаний системы ГЛОНАСС выявился ряд технических проблем, обусловленных требованиями высокой точности определения и прогнозирования орбитальных параметров (эфемерид) порядка единиц метров и наносекундной точности синхронизации бортовых шкал времени. Для решения возникших проблем по инициативе НПО ПМ в 1984 году был разработан пассивный геодезический спутник «Эталон», представляющий собой массивную сферу диаметром 1294 мм и массой 1345 кг. С помощью «Эталона» удалось точно рассчитать силу воздействующего на него светового давления и гравитационного воздействия Земли, Луны и Солнца. Измерения параметров орбиты «Эталона» производились с помощью квантово-оптических (лазерных) средств, сигналы запроса которых отражались от более 2000 уголковых отражателей, размещенных по всей поверхности спутника. По результатам обработки большого объема квантово-оптических дальномерных измерений была создана согласующая модель движения спутников по навигационной орбите ГЛОНАСС, что позволило значительно повысить точность расчета эфемерид КА.
После проведения доработок по результатам испытаний в 1991 году и доведения числа КА до 12 ГНСС ГЛОНАСС распоряжением президента РФ была введена в эксплуатацию в сентябре 1993 года. В 1995 году ГЛОНАСС была развернута в полном составе (24 КА), и решением правительства РФ была представлена для гражданского пользования в международные организации ICAO и IMO.
Гражданское использование GPS началось после гибели корейского авиалайнера Boeing 747 рейса KAL007, нарушившего воздушное пространство СССР вследствие навигационной ошибки, и запрета полетов в районе Сахалина и острова Монерон. Президент Рональд Рейган издал директиву, разрешающую использование GPS гражданскими службами после ввода системы в эксплуатацию, что случилось в 1994 году после полного укомплектования спутниковой группировки (24 КА). Следует отметить, что GPS управляется правительством США, которое может в любой момент лишить доступа к системе или ухудшить точность определения координат. Такое отключение было сделано, например, в отношении индийских военных в 1999 году во время Индо-пакистанского пограничного конфликта в Каргиле. Следует также отметить, что до 2000 года в сигналы GPS гражданского сектора намеренно закладывалась ошибка в определении координат в 10 метров, тем не менее, GPS-навигацией пользовались миллионы обычных потребителей по всему миру.
 |
||
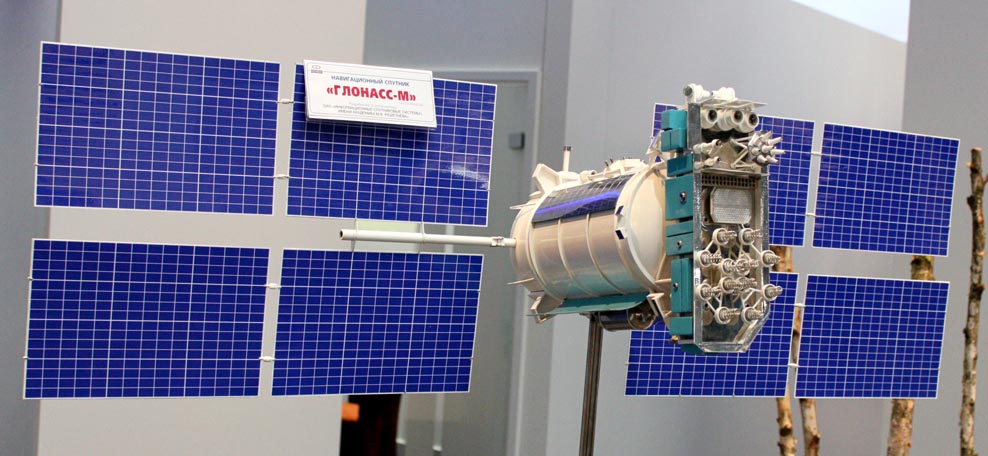
| Рисунок 8. | КА «Глонасс-М». | |
Второй этап в создании ГЛОНАСС был оформлен (работы по нему велись еще со времен СССР) в федеральной целевой программе «Глобальная навигационная система» (ФЦП ГНС), утвержденной постановлением правительства РФ в августе 2001 года. Первый КА второго поколения «Глонасс-М» по ФЦП ГНС был запущен в декабре 2003 года вместе с двумя КА «Глонасс». КА «Глонасс-М» (Рисунок 8) со сроком активного существования (САС) 7 лет отличается от стандартных «Глонассов» улучшенными тактико-техническими характеристиками. В оборудовании «Глонасс-М» был применен ряд новых технологических решений, таких, как использование новых типов радиосигналов в диапазоне L3 (1202.25 МГц), рубидиевых стандартов частоты, межспутниковых лазерных линий, литий-ионных аккумуляторов, новых бортовых ЦВМ (центральных вычислительных машин). На Рисунке 9 приведен график запусков КА системы ГЛОНАСС (до 2012 года).
 |
||
| Рисунок 9. | График запусков КА «Глонасс»/М/К. | |
Дальнейшее развитие системы ГЛОНАСС осуществляется в соответствии с федеральной целевой программой «Поддержание, развитие и использование системы ГЛОНАСС на 2012-2020 годы», утвержденной постановлением Правительства РФ в марте 2012 года. КА «Глонасс-M» выпускались до 2015 года, на смену им пришли КА третьего поколения «Глонасс-К» (Рисунок 10), первый из которых был запущен в феврале 2011 года с космодрома Плесецк. Спутники «Глонасс-К» с САС 10 лет выполнены на базе негерметичной платформы «Экспресс 1000», аппаратура КА рассчитана для работы в условиях открытого космоса, что позволило снизить массу аппарата до 935 кг (у «Глонасс-М» – 1415 кг), а мощность электропитания увеличить до 1.6 кВт. В состав оборудования спутника входит и аппаратура для международной системы спасения «КОСПАС-SARSAT». Кроме основной аппаратуры для ГНСС ГЛОНАСС в «Глонасс-К» устанавливается дополнительный блок для работы в формате CDMA, совместимом с сигналами систем GPS/Galileo, что существенно облегчает построение мультисистемных навигационных приемников. КА «Глонасс-К» выполнены полностью на российских комплектующих.
 |
||
| Рисунок 10. | КА «Глонасс-К». | |
В 2018 году закончилась разработка модернизированного КА «Глонасс-К2», дата запуска которого пока не определена. В настоящее время орбитальная группировка ГЛОНАСС состоит из 25 спутников, один из которых резервный. Заявленный для «Глонасс-М» (основа группировки) САС в 7 лет реальные спутники «перерабатывают», поэтому новые аппараты буду выводиться на орбиты по мере выбывания отработавших ресурс либо аварийных аппаратов.
GPS и ГЛОНАСС имеют много общего не только в отношении характеристик сигналов, но и в другом аспекте. Речь идет о глобальной дифференциальной системе GDGPS, состоящей из сети станций дифференциальной коррекции и мониторинга (СДКМ) и центров обработки данных. Система GDGPS получает данные о положении спутников GPS и ГЛОНАСС от станций СДКМ в реальном времени, что позволяет прогнозировать положение спутников с точностью до сантиметров на несколько дней вперед. В России в ведении Геофизической службы РАН имеется, по крайней мере, 11 СДКМ, поставляющих данные по спутникам GPS и ГЛОНАСС американским коллегам. У ГЛОНАСС имеются 22 аналогичных российских СДКМ, некоторые из которых поставляют данные для обеих систем. Станции базируются на территории России (от Санкт-Петербурга до Южно-Сахалинска), в Бразилии и Антарктиде.
Кроме упомянутых систем дифференциальной коррекции для повышения точности GPS и ГЛОНАСС создана «Международная служба глобальной навигационной спутниковой системы» (IGS) под эгидой НАСА, в которую входят более 200 организаций по всему миру. В России развернуто порядка двух десятков пунктов наблюдения IGS.
На практике для повышения точности позиционирования различные производители изделий микроэлектроники выпускают навигационные микросхемы и модули с поддержкой обеих систем ГНСС, например, подобные чипы интегрированы в ряд смартфонов и планшетов Apple, не говоря уже о специальных навигационных приложениях для автомобилей.



