
При использовании одного единственного ультразвукового датчика, как правило, не возникает каких-либо проблем. Сенсор может работать непрерывно. По его показаниям не сложно рассчитать расстояние до объекта. Для этого следует воспользоваться информацией из документации или обратиться к материалам статьи Finding Distance Using Analog Voltage.



Несогласованная работа нескольких ультразвуковых датчиков
(Не рекомендуется)
Несогласованная, одновременная и непрерывная работа нескольких ультразвуковых датчиков, как правило, невозможна. Если оставить вывод 4 (контакт RX) не подключенным, то при запуске датчики практически одновременно начнут процесс измерения. Поскольку они являются независимыми и не синхронизированными, то интервалы генерации ультразвуковых импульсов будут хоть немного, но отличаться. Эти расхождения с течением времени вызовут перекрестные помехи между сенсорами в большинстве приложений.
При использовании датчиков MaxSonar с аналоговым выходом эти помехи будут проявляться как периодически возникающие шумы в выходном сигнале напряжения. При использовании цифровых сенсоров перекрестные помехи будут вызывать периодические ложные отсчеты. Проблема явно проявляется на больших расстояниях.
Еще раз стоит подчеркнуть, что проблема заключается в том, что датчики не синхронизированы по времени или скорости. Один датчик всегда работает немного быстрее, чем другой. Например, датчик 1 работает с периодом 49.0 мс, тогда как датчик 2 работает с периодом 49.2 мс. Когда синхронизация отсутствует, один сенсор может находиться в режиме передачи, в то время как другой сенсор находится в режиме приема. В итоге чужой сигнал принимается за свой собственный. Чем выше степень синхронизации датчиков, тем дольше будет длиться период стабильной работы. Если расхождение в скорости оказывается значительным, то возможен вариант, что периоды стабильной работы и вовсе будут отсутствовать.
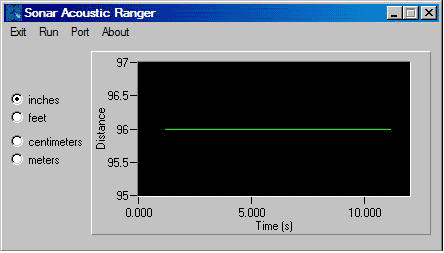
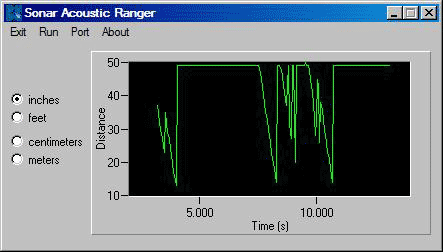
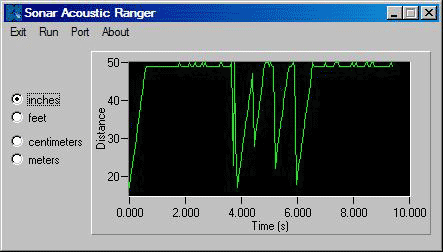
На Рис. 1 показан выходной сигнал датчика, работающего в одиночестве при отсутствии других сенсоров. Он демонстрирует уверенное обнаружение объекта на дистанции 96 дюймов (примерно 244 сантиметра). На Рис. 2 и 3 показан выходной сигнал датчика, который работает одновременно с другим активным сенсором. По мере того, как рассинхронизация датчиков увеличивается, показания становятся все более нестабильными.
 |
|
| Рис. 1. | Выходной сигнал ультразвукового датчика, работающего в одиночестве. |
 |
|
| Рис. 2. | Выходной сигнал ультразвукового датчика, работающего одновременно с другим датчиком. |
 |
|
| Рис. 3. | Выходной сигнал ультразвукового датчика, работающего одновременно с другим датчиком. |
Синхронный запуск нескольких ультразвуковых датчиков MaxSonar
(Допустим в некоторых приложениях)
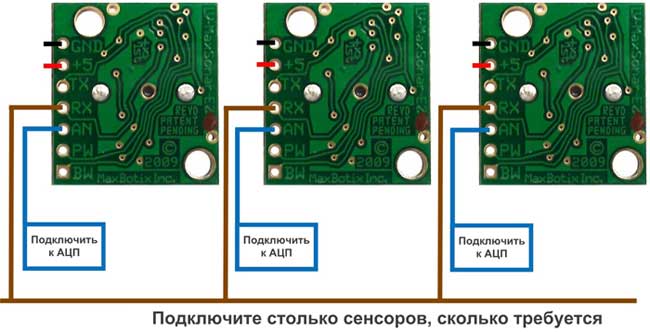
Соедините все линии RX используемых датчиков MaxSonar вместе и подключите к вашей схеме управления, например, к выводу микроконтроллера или даже к таймеру 555-ой серии, настроенного на формирование строба высокого уровня с длительностью не менее 20 мкс и с периодом, большим или равным времени, которое указано в спецификации датчика.
 |
|
| Рис. 4. | Объединение входов RX используемых датчиков MaxSonar. |
Описанная схема подключения представлена на Рис. 4.
Допускается одновременный запуск нескольких сенсоров MaxSonar с помощью короткого импульса (более 20 мкс), подаваемого на вход 4 (RX). Для датчиков серии LV-MaxSonar запуск можно производить с периодом 50 мс. Для датчиков серии XL-MaxSonar минимальный период составляет 100 мс.
Датчики MaxSonar из-за постоянно изменяющегося усиления обычно игнорируют соседние сенсоры при одновременном запуске. Этот метод особенно удобен при использовании датчиков с аналоговым выходом, поскольку аналоговое напряжение может быть прочитано в любое время.
Описанный способ работает для всех серий датчиков MaxSonar. В качестве примера на Рис. 4 использовались сенсоры LV-MaxSonar-EZ. Таким образом, пока контакт 4 (RX) подключен к одному и тому же управляющему сигналу, все датчики будут стартовать одновременно.
Последовательный запуск нескольких ультразвуковых датчиков MaxSonar
(Самый надежный)
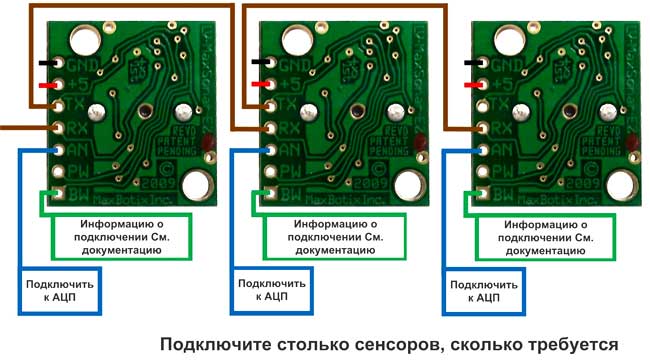
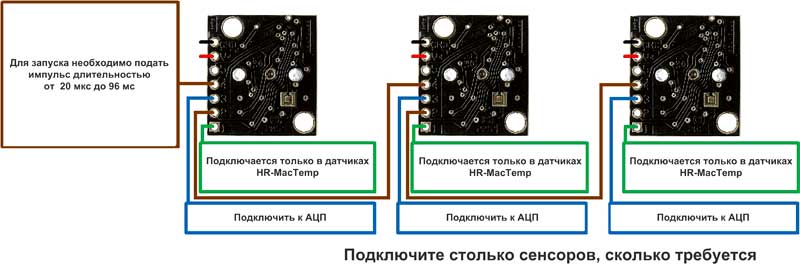
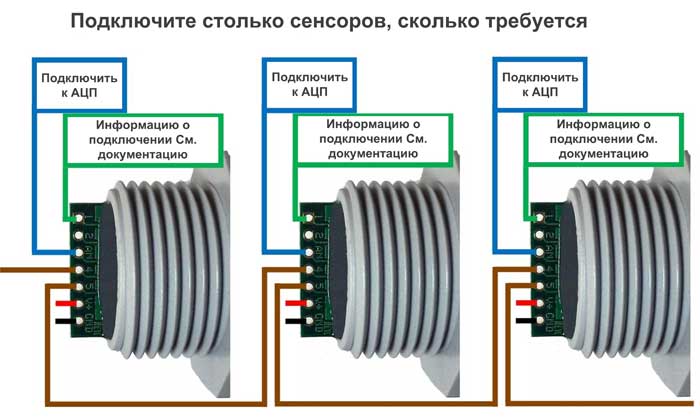
Для последовательного запуска нескольких датчиков следует использовать следующую схему включения: сигнал от управляющего устройства (например, микроконтроллера) подключите к выводу 4 (RX) первого датчика, затем подключите вывод 5 (TX) первого датчика к выходу 4 (RX) следующего датчика, и т.д. Включите последовательно в цепь столько сенсоров, сколько требуется в приложении. Схемы включения для различных серий датчиков представлены на Рис. 5-8.
 |
|
| Рис. 5. | Диаграмма последовательного включения датчиков LV-MaxSonar-EZ и XL-MaxSonar-EZ/ AE. |
 |
|
| Рис. 6. | Диаграмма последовательного включения датчиков HRLV-MaxSonar-EZ. |
 |
|
| Рис. 7. | Диаграмма последовательного включения датчикова MaxSonar-WR и MaxSonar-WRC. |
 |
|
| Рис. 8. | Диаграмма последовательного включения датчиков HRXL-MaxSonar-WR и HRXL-MaxSonar-WRC. |
Чтобы запустить процесс последовательных измерений, необходимо включить первый датчик, подав на его вход 4 (RX) сигнал высокого уровня длительностью более 20 мкс. Выполнение измерений каждым следующим сенсором будет начинаться только после того, как завершит свою работу предыдущий датчик (каждые 50 мс для датчиков LV-MaxSonar или каждые 100 мс для датчиков XL-MaxSonar). Этот метод управления является самым надежным. Между датчиками не возникает никаких перекрестных помех, но период полного цикла измерений будет зависеть от числа используемых сенсоров.
Зацикленный запуск последовательно включенных ультразвуковых датчиков MaxSonar
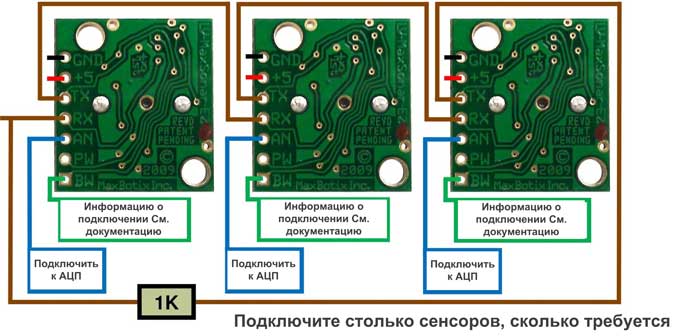
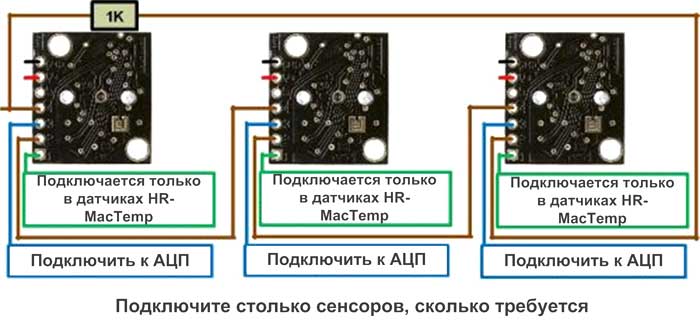
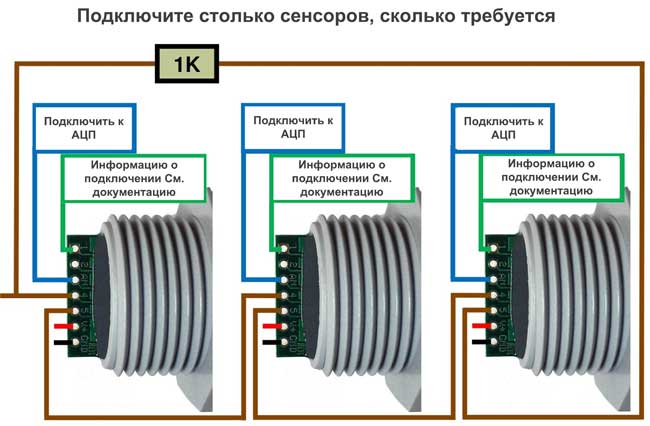
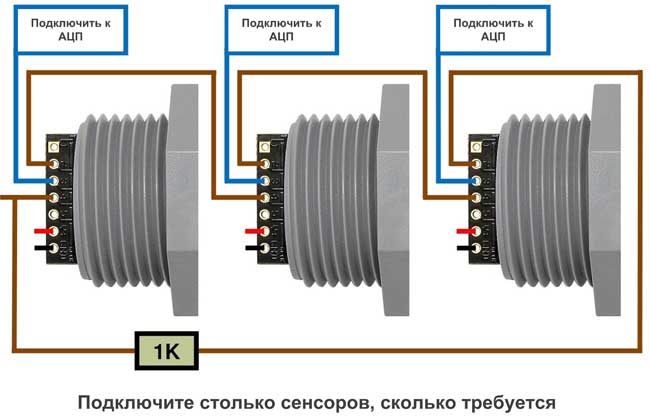
Чтобы зациклить процесс измерений последовательно включенных ультразвуковых датчиков MaxSonar, соедините выход 5 (TX) последнего датчика с контактом 4 (RX) первого датчика через резистор 1 кОм. Подключение остальных сенсоров производится, как и в предыдущем случае. Схемы включения для различных серий датчиков представлены на Рис. 9-12.
 |
|
| Рис. 9. | Диаграмма последовательного включения датчиков LV-MaxSonar-EZ и L-MaxSonar-EZ/AE для выполнения зацикленных измерений. |
 |
|
| Рис. 10. | Диаграмма последовательного включения датчиков HRLV-MaxSonar-EZ для выполнения зацикленных измерений. |
 |
|
| Рис. 11. | Диаграмма последовательного включения датчиков XL-MaxSonar-WR и XL-MaxSonar-WRC для выполнения зацикленных измерений. |
 |
|
| Рис. 12. | Диаграмма последовательного включения датчиков HRXL-MaxSonar-WR и HRXL-MaxSonar-WRC для выполнения зацикленных измерений. |
При использовании такого включения процесс измерений начинается с подачи микроконтроллером разрешающего импульса длительностью более 20 мкс на вход 4 (RX) первого датчика. После этого микроконтроллер должен перевести свой выход в высокоимпедансное состояние. В этом случае, после того как последний датчик завершит процесс измерения, на его выходе 5 (TX) сформируется высокий сигнал, который поступит на вход 4 (RX) первого датчика и вновь запустит его.
Перекрестные помехи при одновременном использовании нескольких ультразвуковых датчиков. Вопросы и ответы
Основная проблема при использовании нескольких ультразвуковых датчиков заключается в появлении перекрестных помех. Перекрестные помехи возникают, когда два (или более) расположенных рядом ультразвуковых датчика принимают сигналы друг от друга. Когда они не синхронизированы, это приводит к негативным последствиям.
Вот конкретные случаи и вопросы, которые встречаются в запросах технической поддержки:
- Допустим, есть несколько машин, на каждой из которых установлен свой собственный ультразвуковой датчик, направленный вперед. Будут ли датчики разных машин мешать друг другу при перемещении по складу?
Это будет зависеть от расстояния и направленности сенсоров. Если они направлены непосредственно друг на друга, и их зоны обнаружения перекрываются, то высока вероятность возникновения перекрестных помех. Кроме того, если речь идет о замкнутых помещениях с плотными стенами, то возможны проблемы с дополнительными отражениями. Однако даже если используется большой и открытый склад, то все равно остается, пусть и минимальная, вероятность перекрестных помех. Обратите внимание, что их влияние будет не таким значительным, если использовать датчики с внутренней фильтрацией, например, из серии HR.
- Какой фронтальный датчик лучше выбрать для робота: LV или HRLV?
Работа двух датчиков LV-MaxSonar-EZ, расположенных в передней части робота, может привести к перекрестным помехам. То есть, высока вероятность получения ложных показаний из-за близости сенсоров. Для таких случаев рекомендуется применять сенсоры из серии HRLV, вместо стандартных датчиков LV, впрочем, решение остается за разработчиком. Благодаря встроенной фильтрации возможна одновременная и несинхронизированная работа нескольких ультразвуковых датчиков HRLV при минимальном влиянии перекрестных помех. В случае необходимости датчики любой серии могут работать совместно при использовании одного из способов синхронизации, рассмотренного выше.
- Каково минимальное расстояние между ультразвуковыми датчиками, на котором они не будут мешать друг другу? (для считывания результатов используется RS-232)
К сожалению, из-за обилия пользовательских приложений, различных вариантов и условий эксплуатации ответить однозначно на этот вопрос невозможно. Как правило, чтобы избежать перекрестных помех, необходимо располагать датчики как можно дальше друг от друга. Кроме того, следует убедиться, что они не направлены друг на друга. Возможно, для поиска ответа на этот вопрос в конкретном приложении потребуется провести дополнительные испытания, и самостоятельно пройти определенный путь проб и ошибок.
Посмотреть более подробно технические характеристики ультразвуковых датчиков от MaxBotix
 Купить LV-MaxSonar-EZ на РадиоЛоцман.Цены
Купить LV-MaxSonar-EZ на РадиоЛоцман.Цены

