
Machine Design
Инженеры Военно-морской научно-исследовательской лаборатории разрабатывают автономный подводный аппарат (autonomous underwater vehicle – AUV), имитирующий движения и действия рифовой рыбы губана-клюворыла. Конечной целью является создание AUV, способного на низкой скорости перемещаться и маневрировать в прибрежных водах, решая задачи, требующие ловкости и умения обнаруживать и идентифицировать элементы окружающей среды. У ВМФ США уже имеются высокоскоростные AUV, предназначенные для протяженных миссий в открытых водах. Теперь же флоту потребовался аналогичный аппарат для прибрежных вод, для которых характерны нагромождения препятствий и постоянные изменения потоков.


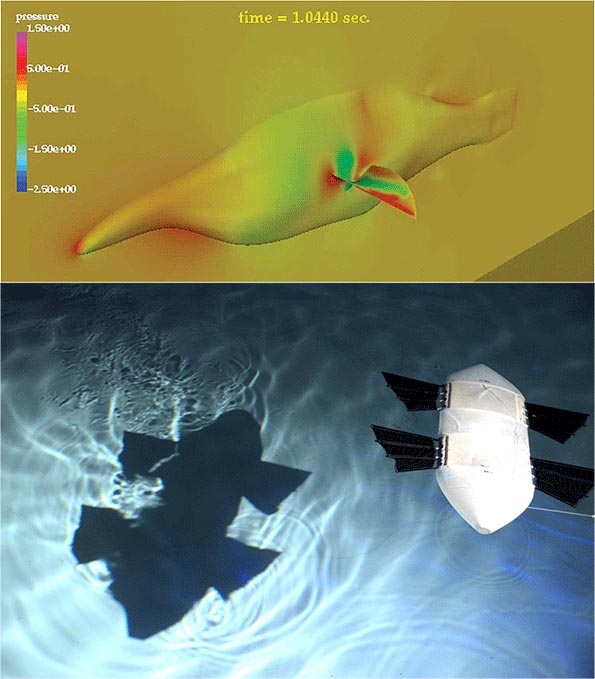 |
| Ученые из Военно-морской научно-исследовательской лаборатории США, используя методы вычислительной гидродинамики, смоделировали геометрию плавников губана-клюворыла, а затем сравнили расчеты с экспериментальными результатами (вверху). Таким образом были созданы четыре искусственных грудных плавника (внизу) – два спереди, и два на корме, приводящих подводного робота в движение и обеспечивающих необходимое управление. (Фото: Военно-морская научно-исследовательская лаборатория США, Jamie Hartman). |
Черпая вдохновение в живой природе, группа инженеров, в конце концов, создала активно управляемый изогнутый плавник рыбы-робота, подобный грудным плавникам губана. Они установили на роботизированной рыбе четыре таких плавника – два спереди, и два в кормовой части, и назвали робота Ванда. (Не в честь ли вышедшего в 1988 году фильма Рыбка по имени Ванда)?
Алгоритм управления плавниками использует информацию о движении робота, окружающих предметах и предварительно запрограммированном положении цели. К настоящему времени специалисты научили робота перемещаться вперед и назад, вверх и вниз, разворачиваться на месте, а также сохранять свою позицию в воде, движущейся со скоростью двух узлов. Робот способен также координировать свои маневры, чтобы, выполняя навигацию, без посторонней помощи двигаться от одной точки к другой.
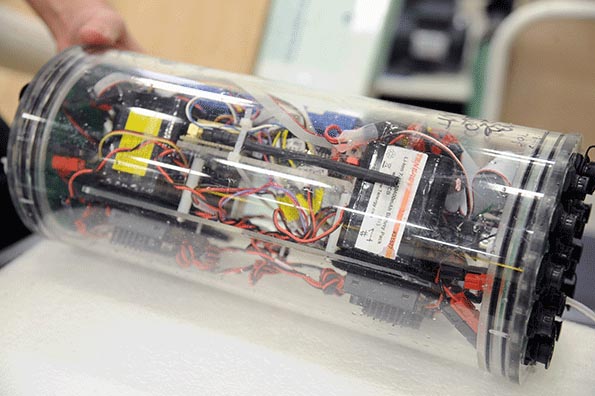 |
| Внутри нового подводного дрона ВМФ размещена водонепроницаемая камера для электроники, в которой находятся источник питания, микроконтроллер, навигационные и контрольные датчики, а также аппаратура связи. Водонепроницаемые разъемы на герметичном отсеке соединяют электронику с приводами плавников и внешними датчиками. (Фото: Военно-морская научно-исследовательская лаборатория США, Jamie Hartman). |
Теперь разработчики приступают к проверке оборудования робота. Первый образец будет снабжен датчиками биохимических агентов, выходные сигналы которых смогут управлять Вандой, заставляя ее плыть вдоль шлейфа химических веществ в направлении их источника. В следующих экземплярах робота эти же плавники будут использоваться для аэродинамического управления. Это позволит сбрасывать AUV с воздуха, после чего аппарат сможет, пройдя часть пути над поверхностью, достигнуть нужной точки и погрузиться в воду.



